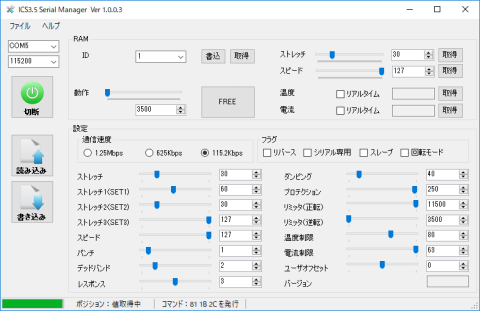
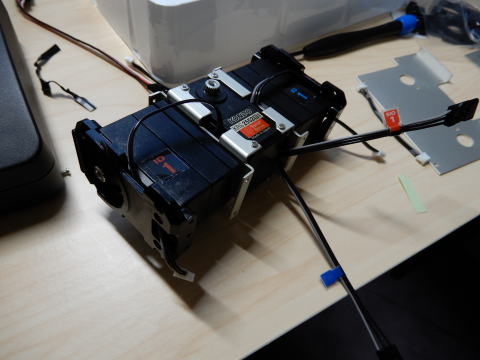
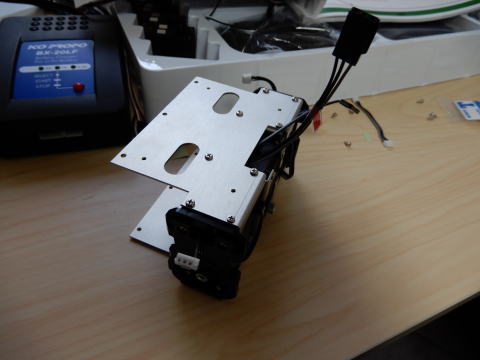
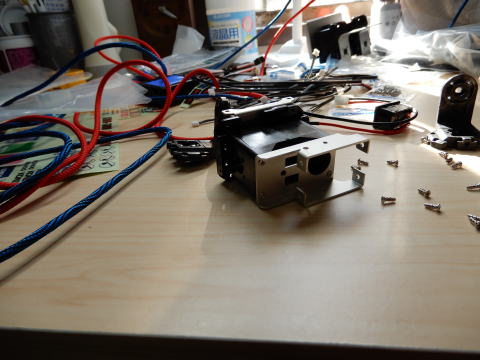
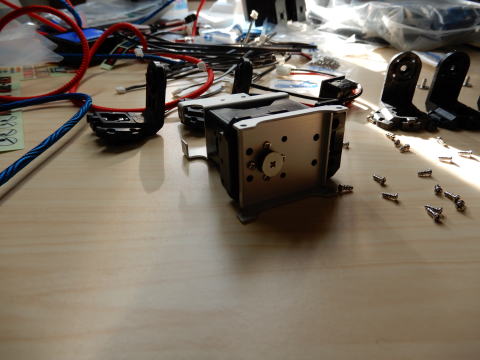
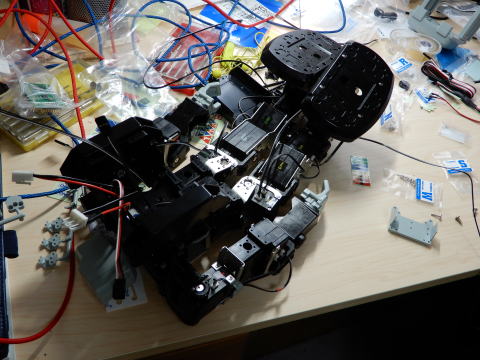
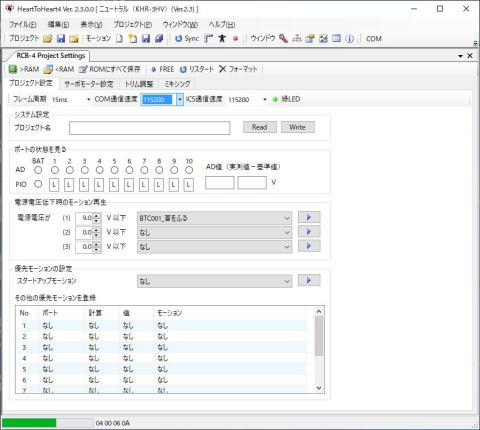
ホームロボットKHR-3HV組み立て KHR-3HV KHR-3HVを組み立てたので、まとめました。 まず、電池を充電しました。 USBコネクターを使って、全てのサーボモーターを、補正(キャリブレーション)しました。 KHR-3HVのCD-ROMから、開発環境をインストールしました。 モーターの補正をしました。ドライバーの更新をしないと、COMポートが認識されず、ドライバーの場所(ディレクトリー)を探すのに、結構、時間がかかりました。 1個1個、モーターの制御が出来る、Serial Managerの画面です。 サーボモーターの動きです。強調表示のため、ホワイトボードマーカーで黒点を付けました。 モーターのキャリブレーションが終わった後、本体の組み立てをしました。 ビスを回していましたが、完全に奥までは、行かないのが1本、あったり、プラスドライバーが使えなくなりました。親指と人差し指が疲れたのと、細かいビスを回すドライバーに、磁石が付いていないので、苦労しました。 胸部の組み立てをしました。 腕の組み立ては、次の通りです。 手の組み立てをしました。 脚と足を組み立てました。 大腿です。 脚です。 足です。 フロントカウル等、上半身を作りました。アッパーアームとボトムアーム部品の取り違いに注意です。 両腕と頭が出来ました。 両脚を組み立てました。 ネジが足りなかったので、追加注文しました。 近藤科学さん の、ネットショップで買いました。 頭直下の配線のコネクターが不調であったため、解体しました。 サーボモーターの中身の様子です。 次のような事が、起きていましたが、ケーブルを、直刺しにして、「COM通信速度とICS通信速度を一致させた」ところ、ROM書き込みが出来ました。 RCB-4HVにの電源をONにすると瞬間的に赤と緑のLEDが点灯しますがすぐに消えてしまいます。 Heart to Heart 4 (HTH4)の画像です。 KHR-3HVのROM書き込みです。 組み立てていたら、脚が左右で異なっていましたので、左右対称になるように、直しました。 一旦、「初期姿勢(ニュートラルポジション)」になってから、動作を始めるのと、全サーボモーターの0点を調整する必要があるらしいです。 ニュートラルポジション全サーボモーターが、0点に行く事 初期姿勢全サーボモーターが、0点に行く事 ホームポジション自分で登録した姿勢 トリムポジションホームポジションからの差分