ROS
I’ll upload how to make catkin_ws, how to run turtle-sim and the results.
Installing ROS kinetic to raspbian 9.4 Stretch
how to install ros kinetic to raspbian 9.4 stretch
sudo apt-get install dirmngr
sudo apt-get update
sudo apt-get upgrade
sudo rosdep init
rosdep update
mkdir -p ~/ros_catkin_ws
cd ~/ros_catkin_ws
rosinstall_generator desktop –rosdistro kinetic –deps –wet-only –tar > kinetic-desktop-wet.rosinstall
wstool init src kinetic-desktop-wet.rosinstall
-> wstool update -j4 -t src
—
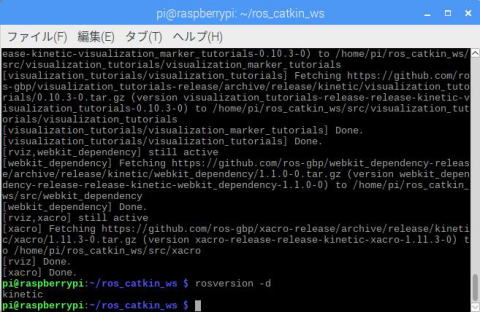
how to check ROS version;
rosversion -d
—
making catkin_ws:
mkdir -p ~/ros_catkin_ws/external_src
cd ~/ros_catkin_ws/external_src
wget http://sourceforge.net/projects/assimp/files/assimp-3.1/assimp-3.1.1_no_test_models.zip/download -O assimp-3.1.1_no_test_models.zip
unzip assimp-3.1.1_no_test_models.zip
cd assimp-3.1.1
cmake .
make -> X (not able to make)
rosinstall_generator desktop –rosdistro kinetic –deps –wet-only –exclude collada_parser collada_urdf –tar > kinetic-desktop-wet.rosinstall
cd ~/ros_catkin_ws
rosdep install -y –from-paths src –ignore-src –rosdistro kinetic -r –os=debian:stretch
sudo ./src/catkin/bin/catkin_make_isolated –install -DCMAKE_BUILD_TYPE=Release –install-space /opt/ros/kinetic
source /opt/ros/kinetic/setup.bash
(option):
echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc
cd ~/ros_catkin_ws
rosinstall_generator ros_comm ros_control joystick_drivers –rosdistro kinetic –deps –wet-only –tar > kinetic-custom_ros.rosinstall
wstool merge -t src kinetic-custom_ros.rosinstall
wstool update -t src
sudo ./src/catkin/bin/catkin_make_isolated –install -DCMAKE_BUILD_TYPE=Release –install-space /opt/ros/kinetic
-> X (not able to run)
sudo ./src/catkin/bin/catkin_make_isolated –install -DCMAKE_BUILD_TYPE=Release –install-space /opt/ros/kinetic -j4
rosinstall_generator desktop –rosdistro kinetic –deps –wet-only –exclude collada_parser collada_urdf –tar > kinetic-desktop-wet.rosinstall
rosdep install -y –from-paths src –ignore-src –rosdistro kinetic -r –os=debian:stretch
sudo ./src/catkin/bin/catkin_make_isolated –install -DCMAKE_BUILD_TYPE=Release –install-space /opt/ros/kinetic -j2
—–
[100%] Building CXX object modules/python2/CMakeFiles/opencv_python2.dir/__/src2/cv2.cpp.o
[100%] Building CXX object modules/python3/CMakeFiles/opencv_python3.dir/__/src2/cv2.cpp.o
-> when running like in the up indication wait over 20 min. 上みたいな表示が出る場合20分間以上待機します
—
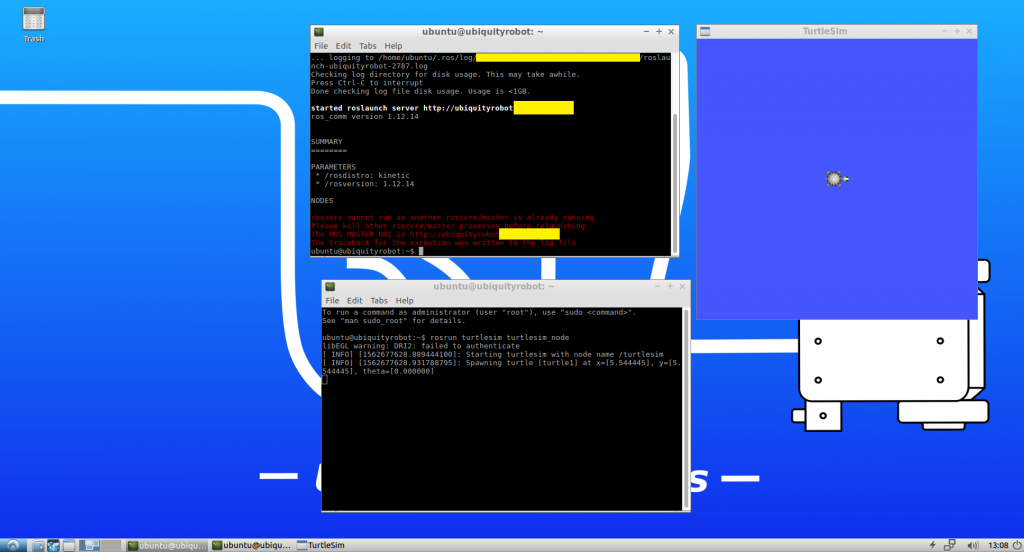
how to run turtle-sim:
roscore
sudo apt-get install ros-kinetic-turtlesim
-> package not found
rosrun turtlesim turtlesim_node
rosrun after running roscore “IN A NEW TERMINAL”
Terminal (rosversion; kinetic)
turtlesim Conduct Result
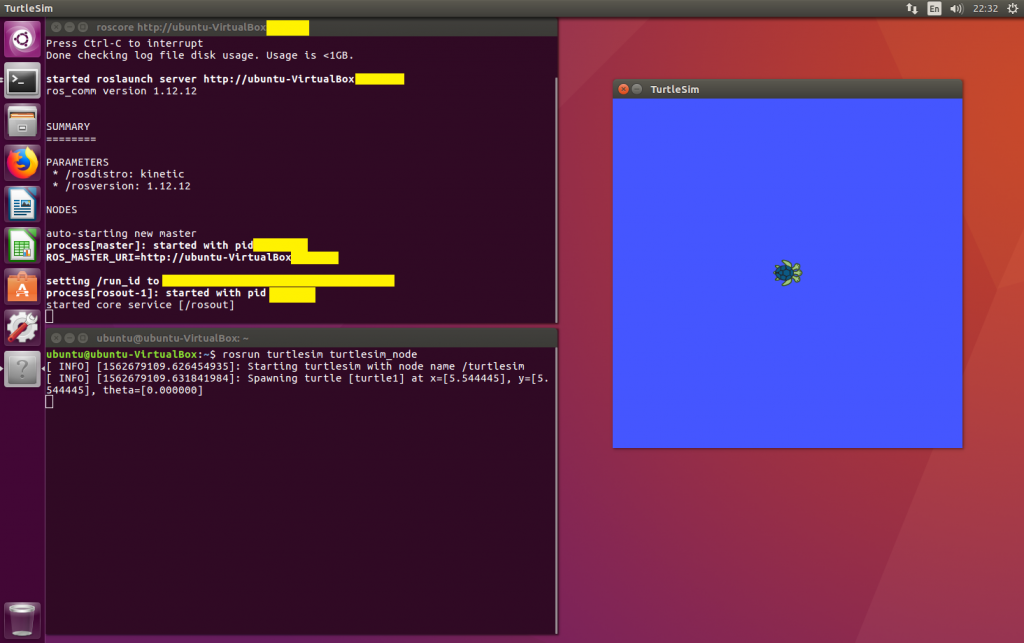
Installing ROS kinetic at Ubuntu 16.04 on Virtual Box
Installing lubuntu? on Raspberry Pi.