























Shinya Takeuchi’s Website
Firs charged the battery.
Calibrated all the Servo Motor by USB connector.
Installed the Developing Environment from KHR-3HV’s CD-ROM.
Calibrated the Motor.
Without updating the Driver, the COM Port can’t be recognized,
so it took plenty of time to find the Driver’s Directory.
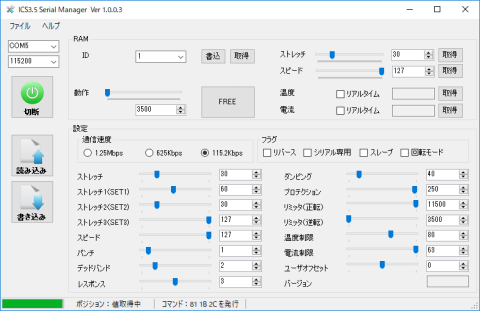
Serial Manager’s Display,
which we can Control the Motor one by one.
Servo Motor’s movement.
Took a black point by White Board Marker for emphasizing indication.
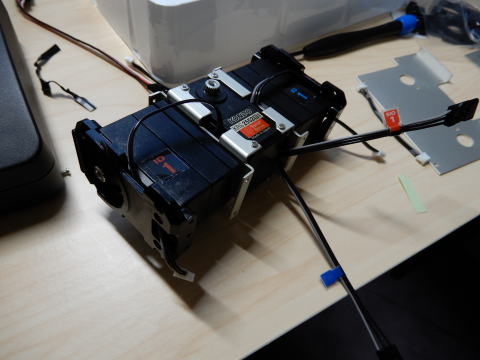
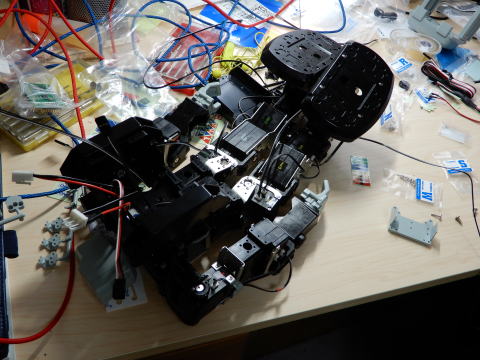
Assembled the Main body after Motor’s Calibration.
Turning the screw, there was one that can’t go far inside completely, and the Plus Driver got out of order.
My Thumb and the Index Finger got exhausted, and there was no magnet attached on the Driver to turn the tiny Screw so it was a hardship.
Assembled the Chest.
The following is the arm’s assembling.
Assembled the Hands.
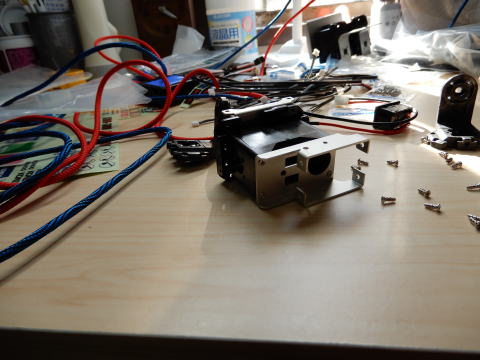
Assembled the Legs and Feet.
Thighs.
Legs.
Feet.
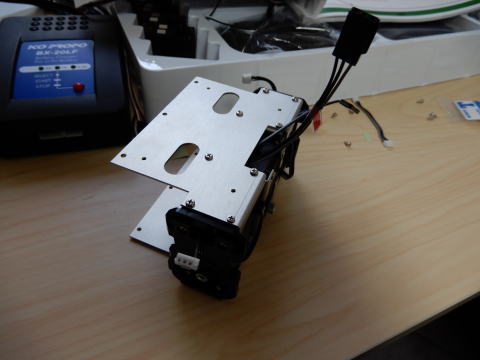
Made the upper part of the body like Front Cowl.
Upper Arm and Bottom Arm’s Parts need to handle with care.
Both Arms and Head are Made.
Assembled both Legs.
Ordered Extra since there was no Screw.
Bought at Kondo-Kagaku’s online store.
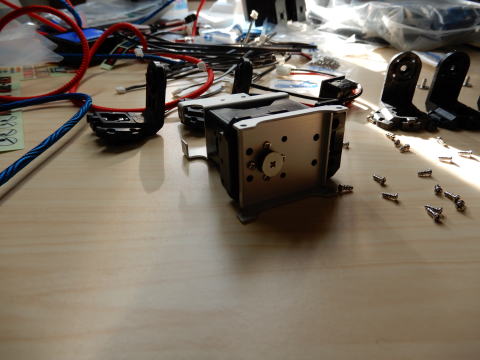
Disassembled since the connector of the wiring under the head.
Servo Motor’s inside view.
This kind of thing has occur, though with Directly Inserting the cable,
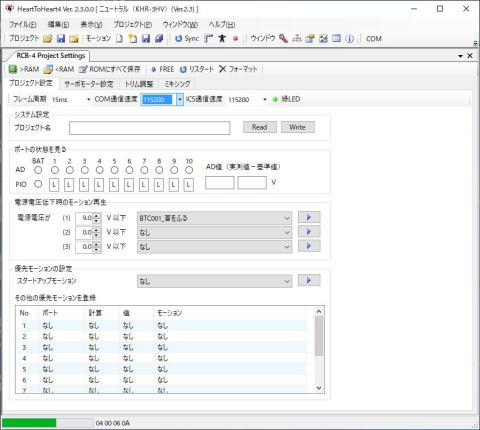
and “Making COM Communication Speed and ICS communication speed, matching”, I can Write the ROM.
Heart to Heart 4 (HTH4)’s image.
KHR-3HV’s ROM writing.
Fixed the legs symmetric since the Legs were different Right and Left,
Assembling them.
It is said that we need to adjust ALL Servo Motor’s 0 point,
because it will once start the motion after “Neutral Position”.
| Neutral Position | All Servo Motors go to 0. |
| Start Position | All Servo Motors go to 0. |
| Home Position | Originally Registerd Position. |
| Trim Position | Differential from Home Position |
We use cookies to improve your experience on our site. By using our site, you consent to cookies.
Websites store cookies to enhance functionality and personalise your experience. You can manage your preferences, but blocking some cookies may impact site performance and services.
Essential cookies enable basic functions and are necessary for the proper function of the website.
These cookies are needed for adding comments on this website.
Google reCAPTCHA helps protect websites from spam and abuse by verifying user interactions through challenges.
Statistics cookies collect information anonymously. This information helps us understand how visitors use our website.
Google Analytics is a powerful tool that tracks and analyzes website traffic for informed marketing decisions.
Service URL: policies.google.com (opens in a new window)
Marketing cookies are used to follow visitors to websites. The intention is to show ads that are relevant and engaging to the individual user.
A video-sharing platform for users to upload, view, and share videos across various genres and topics.
Service URL: www.youtube.com (opens in a new window)
You can find more information in our Cookie Policy and .